Thiết kế robot nhân hình (humanoid) hiện nay đang đặt ra những thách thức lớn về mặt kỹ thuật hệ thống. Để vận hành một cỗ máy có cấu trúc phức tạp như cơ thể người, các kỹ sư phải giải quyết đồng thời yêu cầu về momen xoắn lớn trong không gian lắp đặt hạn hẹp, giảm thiểu độ phức tạp của hệ thống dây dẫn và hạn chế các điểm lỗi tiềm năng (potential failure points).
Mục tiêu đặt ra là làm thế nào để robot chuyển động mượt mà, tự nhận biết được tải trọng tác động mà không cần lắp đặt thêm quá nhiều cảm biến đắt tiền, đồng thời duy trì hiệu năng sử dụng điện ở mức hợp lý. Dưới góc nhìn kỹ thuật, bài viết này phân tích 5 giải pháp công nghệ chính dựa trên sự kết hợp giữa thuật toán điều khiển thông minh và vật liệu bán dẫn dải khe rộng (Wide Bandgap) đang giải quyết các bài toán trên.
1. Phương pháp đo tải không cảm biến bằng StallGuard™
Trong các thiết kế robot truyền thống, việc xác định vị trí gốc (homing) hoặc phát hiện vật cản thường phụ thuộc vào các công tắc hành trình (limit switches) cơ học. Điều này làm tăng số lượng dây dẫn và nguy cơ hỏng hóc vật lý. Công nghệ StallGuard giải quyết vấn đề này bằng phương pháp đo tải không cảm biến (sensorless load measurement).
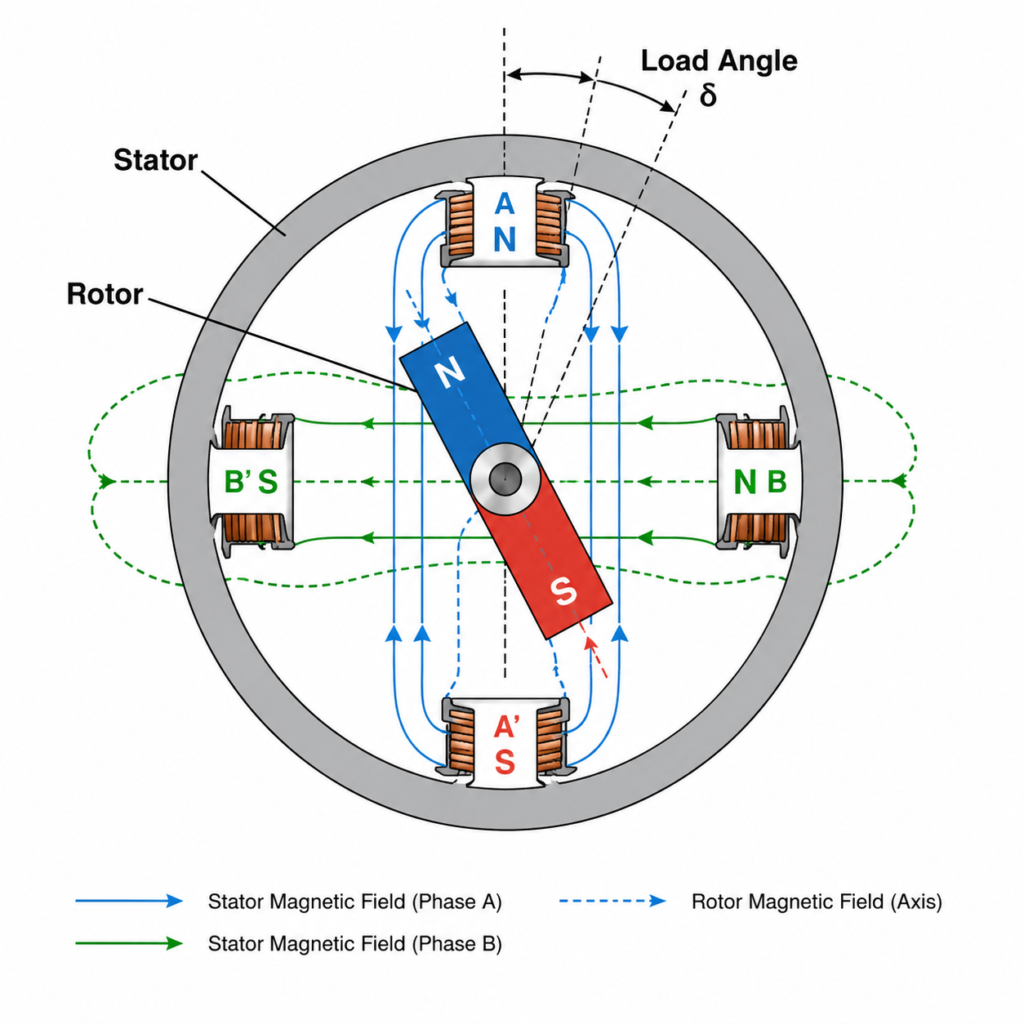
Công nghệ này hoạt động dựa trên việc phân tích sức điện động ngược (Back EMF) sinh ra trong cuộn dây động cơ khi quay để xác định “góc tải” (Load Angle) – góc lệch giữa từ trường rotor và stator.
Khi thiết kế hệ thống, các kỹ sư cần lưu ý sự khác biệt giữa các phiên bản:
- StallGuard2™: Được tối ưu hóa khi đi kèm thuật toán điều khiển dòng điện SpreadCycle™.
- StallGuard4™: Được thiết kế để hoạt động song song với thuật toán điều khiển điện áp StealthChop™.
Việc loại bỏ các cảm biến cơ học giúp tinh giản cấu trúc phần cứng và tăng độ tin cậy vận hành. Hệ thống StallGuard có khả năng phân tách tới 1024 cấp độ tải khác nhau, cung cấp dữ liệu phản hồi có độ phân giải cao để giám sát liên tục trạng thái tải của robot.
Lưu ý về giới hạn kỹ thuật: StallGuard có dải vận tốc sử dụng giới hạn (usable velocity range). Ở vận tốc bằng không, hiệu suất đo lường bằng không do không sinh ra Back EMF. Ở vận tốc quá cao, khi Back EMF cộng với tổn hao điện trở vượt quá điện áp nguồn cấp, driver không thể duy trì dòng điện định mức, làm giảm độ chính xác của phép đo tải.
2. Điều chỉnh dòng điện động lực học bằng CoolStep™ để kéo dài MTBF
Trong điều khiển động cơ bước truyền thống, việc duy trì dòng điện cực đại (full current) liên tục là cần thiết để đảm bảo biên an toàn (safety margin). Tuy nhiên, phương pháp này gây lãng phí năng lượng lớn và sinh nhiệt dư thừa ngay cả khi robot đứng yên hoặc chịu tải nhẹ, làm giảm tuổi thọ của các linh kiện điện tử xung quanh.
Thuật toán CoolStep giải quyết vấn đề này bằng cách tự động điều chỉnh dòng điện cấp vào động cơ dựa trên dữ liệu tải thực tế nhận được từ StallGuard:
- Khi tải giảm, dòng điện tự động hạ xuống mức tối thiểu.
- Khi tải tăng, hệ thống lập tức bù dòng để duy trì momen xoắn yêu cầu.
Sự kết hợp này đem lại hiệu quả thực tế: tiết kiệm tới 75% năng lượng tiêu thụ khi đi cùng StallGuard2 và đạt mức tiết kiệm lên đến 90% khi hoạt động cùng StallGuard4.
Dưới góc độ vận hành, việc giảm nhiệt lượng tỏa ra không chỉ cho phép giảm kích thước động cơ (downsizing) cho cùng một mức tải, mà còn trực tiếp kéo dài thời gian trung bình giữa các lỗi (MTBF – Mean Time Between Failures) của toàn bộ hệ thống robot.
3. Ứng dụng sức điện động ngược (Back EMF) trong chẩn đoán trạng thái
Trong kỹ thuật điện tử thông thường, sức điện động ngược (Back EMF) thường được xem là một dạng nhiễu phản hồi cần được triệt tiêu. Tuy nhiên, trong cấu trúc điều khiển chuyển động của robot, hiện tượng vật lý này được tận dụng như một công cụ chẩn đoán hiệu quả.
Hệ thống StallGuard thực hiện đo lường sự chênh lệch giữa năng lượng điện đầu vào và năng lượng phản hồi về nguồn. Lượng năng lượng dư này đại diện cho “trữ năng góc tải”.
Khi góc tải tiến dần về mức 90 độ, năng lượng dư này sẽ tiệm cận về mức không, đồng nghĩa với việc động cơ có nguy cơ rơi vào trạng thái mất bước (stall). Bằng cách theo dõi liên tục chỉ số này, robot có thể tự “cảm nhận” được các tương tác vật lý bên ngoài và chủ động dừng hoặc điều chỉnh chuyển động trước khi xảy ra sự cố va chạm nghiêm trọng mà không cần phủ một lớp cảm biến lực phức tạp bên ngoài vỏ.
4. Tích hợp vật liệu GaN nâng cao mật độ công suất tại các khớp nối
Kích thước của bộ biến tần (inverter) là một trong những rào cản lớn nhất khi muốn tích hợp hệ thống điều khiển vào các khớp nối nhỏ hẹp của robot humanoid. Việc ứng dụng vật liệu bán dẫn Gallium Nitride (GaN) đã giải quyết được thách thức này nhờ khả năng hoạt động ở tần số chuyển mạch rất cao, lên đến 150kHz.
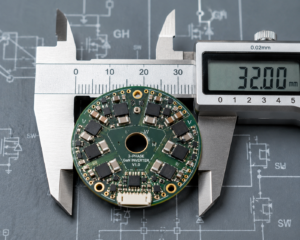
Một ví dụ điển hình là thiết kế bo mạch EPC91122 của hãng EPC, tích hợp toàn bộ bộ biến tần 3 pha trong một bảng mạch tròn có đường kính chỉ 32mm.
Việc tích hợp trực tiếp bộ điều khiển siêu nhỏ này vào khung động cơ mang lại lợi ích kỹ thuật quan trọng:
- Giảm thiểu độ tự cảm vòng lặp (loop inductance).
- Cải thiện hiệu suất động lực học của hệ thống truyền động.
- Giảm thiểu nhiễu điện từ (EMI).
- Cho phép các khớp robot phản hồi tức thời với các lệnh chuyển động phức tạp.
5. Kiểm soát tiếng ồn và tăng độ phân giải chuyển động bằng StealthChop và Microstepping
Khả năng ứng dụng thực tế của robot humanoid trong môi trường gia đình hoặc y tế phụ thuộc lớn vào mức độ tiếng ồn khi vận hành. Tiếng rít tần số cao từ động cơ bước truyền thống thường gây khó chịu cho người xung quanh.
Công nghệ StealthChop2™ sử dụng thuật toán điều khiển dựa trên điện áp để triệt tiêu tiếng ồn tần số cao ngay từ gốc rễ, giúp động cơ hoạt động gần như yên tĩnh. Khi kết hợp với kỹ thuật điều khiển hướng trường (Field-Oriented Control – FOC) thay vì phương pháp băm xung hình thang (trapezoidal commutation) truyền thống, chuyển động của robot đạt được sự mượt mà cần thiết.
Bên cạnh đó, việc áp dụng kỹ thuật chia nhỏ bước lên tới 256 vi bước (microstepping) giúp hệ thống đạt độ phân giải góc quay cực cao, ở mức 0.007°. Đây là thông số kỹ thuật cốt lõi giúp các cơ cấu chấp hành như ngón tay robot có thể thực hiện được các thao tác đòi hỏi sự tinh tế cao, như cầm nắm sợi tơ hay vận hành dụng cụ y tế.
Nguồn tham khảo
https://www.embedded.com/motor-control-ics-higher-accuracy-and-efficiency-for-robotics
https://www.analog.com/en/resources/app-notes/AN-002.html