Nằm trong chuỗi bài viết chủ đề “Kiến thức về Cảm biến”
💬
“Tại sao chỉ với hai điện trở rẻ tiền, bạn có thể biến một linh kiện vật lý đơn giản thành một thiết bị đo lường thông minh? Và tại sao đôi khi đèn LED của bạn lại tự dưng nhấp nháy ‘ma quái’ dù chẳng có ai chạm tay vào nút bấm?”
🌪️ 1. Hiện tượng “Lơ lửng” (Floating State) – Kẻ thù của sự ổn định
Trong thế giới kỹ thuật số, một chân ngõ vào của vi điều khiển luôn cần nhận diện một mức điện áp cực kỳ rõ ràng và dứt khoát: Cao (High/1) hoặc Thấp (Low/0).
Nếu bạn để thiết kế một chân ngõ vào hoàn toàn tự do, không kết nối với bất kỳ mức điện áp xác định nào, chân đó sẽ lập tức rơi vào trạng thái nguy hiểm gọi là “lơ lửng” (floating).
🔑 Bản chất của trạng thái Lơ lửng
Khi ở trạng thái lơ lửng, chân chip hoạt động y hệt một chiếc ăng-ten cực kỳ nhạy bén. Nó sẽ hấp thụ và thu nhận vô điều kiện tất cả các loại nhiễu điện từ trường có sẵn trong không khí, tĩnh điện từ bàn tay con người khi lại gần hoặc từ các đường dây điện lân cận.
Kết quả là vi điều khiển liên tục đọc về các giá trị logic 0 và 1 nhảy múa bất quy tắc, gây ra các hành vi điều khiển sai lệch, chập chờn cho toàn bộ hệ thống phần cứng.
🔌 2. Điện trở Kéo (Pull-up & Pull-down): Xác lập trật tự logic
Để triệt tiêu hoàn toàn trạng thái lơ lửng và đưa chân ngõ vào về các mức logic ổn định tuyệt đối, các kỹ sư luôn sử dụng hai cấu hình điện trở cơ bản:
- Điện trở Kéo lên (Pull-up): Kết nối trực tiếp chân ngõ vào của chip với nguồn dương (V_CC). Trạng thái mặc định của hệ thống khi không có tín hiệu can thiệp (ví dụ nút nhấn hở) sẽ được giữ vững ở Mức Cao (1). Khi bạn bấm nút (đấu nối trực tiếp chân chip xuống đất Ground), điện áp ngay lập tức bị kéo sụp về mức 0 V (Mức Thấp) một cách dứt khoát.
- Điện trở Kéo xuống (Pull-down): Kết nối trực tiếp chân ngõ vào của chip xuống đất (GND). Trạng thái mặc định của hệ thống sẽ luôn được duy trì ở Mức Thấp (0). Khi bạn thực hiện bấm nút (đấu nối chân chip lên nguồn dương V_CC, mức điện áp đo được tại chân chip lập tức tăng vọt lên Mức Cao (1).
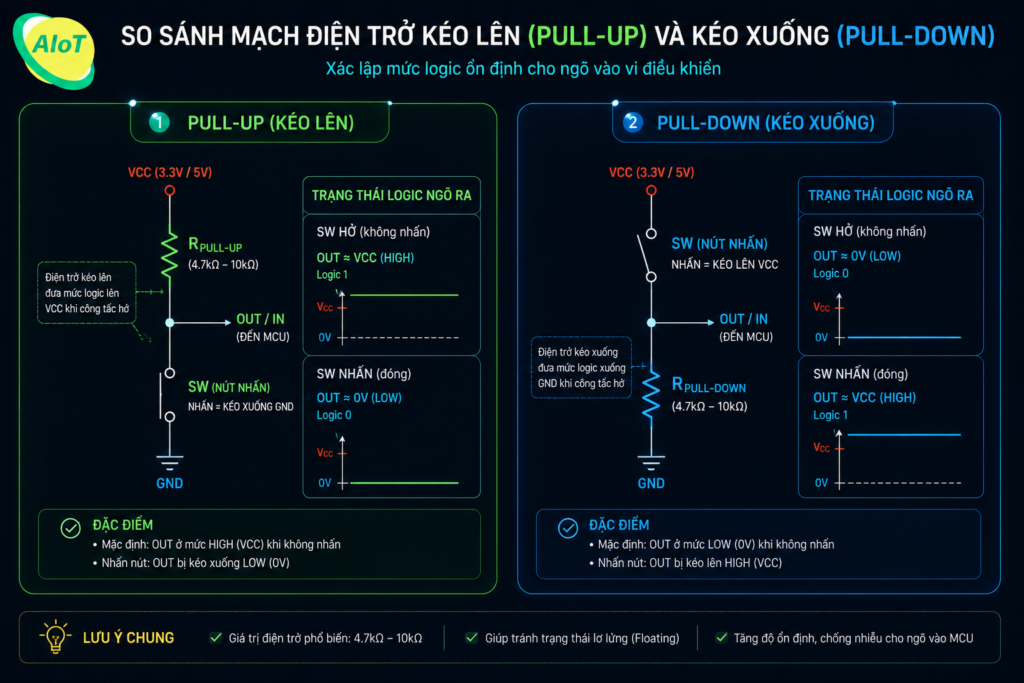
💡 Mẹo chọn giá trị “Vàng” từ chuyên gia
Thông thường, giá trị điện trở kéo 10 kΩ là lựa chọn chuẩn mực hàng đầu cho hầu hết các ứng dụng vi điều khiển thông dụng. Trị số này đảm bảo sự cân bằng lý tưởng: đủ lớn để hạn chế hao phí dòng điện rò rỉ khi bấm nút, nhưng cũng đủ nhỏ để dẫn dòng chống nhiễu vô cùng hiệu quả.
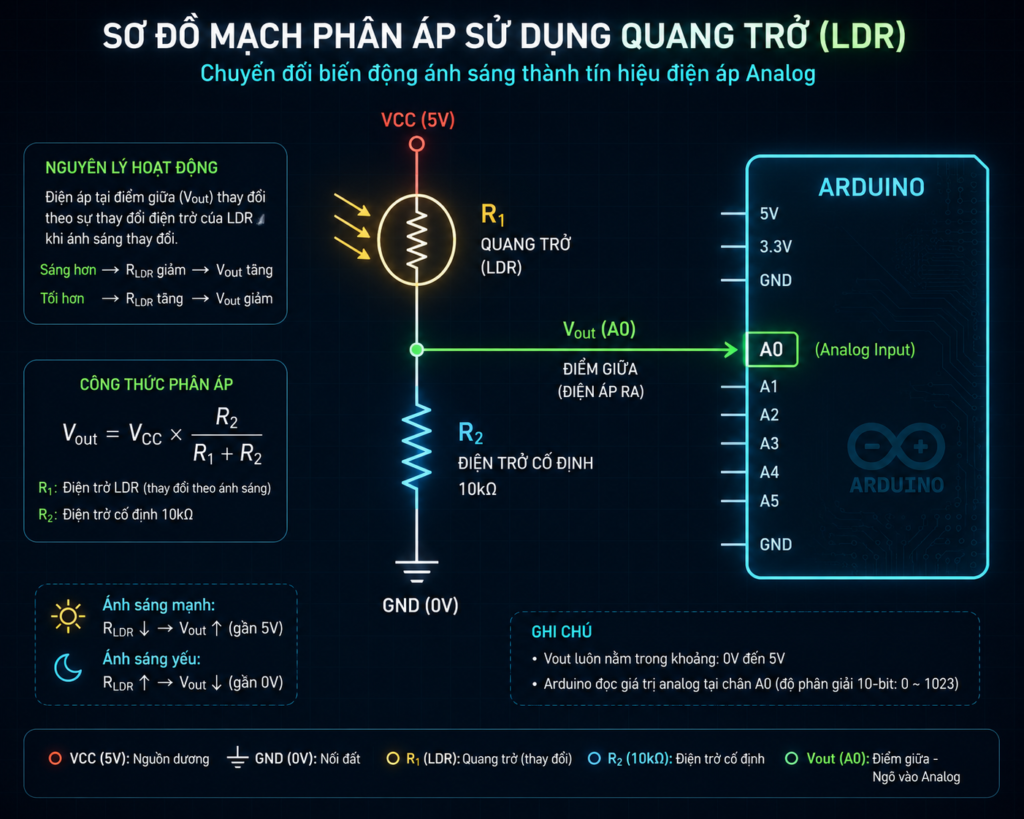
📐 3. Mạch Phân áp (Potential Divider): Ngôn ngữ của Cảm biến Analog
Hầu hết các dòng cảm biến rời rạc cơ bản hiện nay như quang trở (LDR) hay điện trở nhiệt (Thermistor) không tự sinh ra dòng điện hay điện áp ngõ ra, chúng chỉ đơn thuần thay đổi giá trị điện trở nội tại của mình theo tác nhân môi trường.
Do bộ vi xử lý không thể đo đạc trực tiếp sự thay đổi điện trở, chúng ta bắt buộc phải sử dụng Mạch Phân áp (Potential/Voltage Divider) để biến đổi sự dao động điện trở này thành sự thay đổi điện áp tuyến tính, từ đó đọc qua bộ ADC của chip.
📝 Công thức cốt lõi của mạch phân áp
Mạch phân áp gồm hai điện trở R_1 và R_2 đấu nối tiếp. Điện áp ngõ ra V_o trích xuất từ điểm chung ở giữa hai điện trở được tính bằng biểu thức:
Vₒ = Vₛ × [R₂ / (R₁ + R₂)]
Tùy thuộc vào vị trí đặt cảm biến trong mạch nối tiếp, ta có hai xu hướng thay đổi điện áp đặc trưng:
- Nếu cảm biến nằm ở nhánh trên (R_1): Khi trị số điện trở cảm biến giảm xuống (ví dụ trời sáng hơn đối với LDR), mẫu số của phân số giảm đi, làm cho điện áp ngõ ra V_o (đo trên R_2) tăng lên.
- Nếu cảm biến nằm ở nhánh dưới (R_2): Khi trị số điện trở cảm biến giảm xuống, tỷ lệ cầu phân áp thay đổi khiến mức điện áp ngõ ra V_o (đo trên chính cảm biến) giảm xuống.
💡 4. Ví dụ thực tế trong đời sống kỹ thuật
Các cấu trúc mạch phân áp và điện trở kéo vô cùng đơn giản này lại là nền móng cho những ứng dụng thiết thực nhất xung quanh chúng ta:
- Nút nhấn bàn phím máy tính: Tích hợp các mạch điện trở kéo nhằm đảm bảo máy tính không bao giờ tự ý ghi nhận các ký tự “ma” do nhiễu điện trường phòng gây ra.
- Đèn đường chiếu sáng tự động: Sử dụng mạch phân áp chứa quang trở LDR để liên tục định lượng mức độ sáng, tự động đóng ngắt rơ-le kích hoạt đèn đường khi trời tối sầm.
- Tay cầm chơi game (Joystick): Cấu tạo gồm hai trục xoay kết nối vào hai biến trở (Potentiometer) hoạt động như những mạch phân áp linh động để chuyển đổi góc nghiêng tay cầm thành hệ tọa độ X – Y của nhân vật trên màn hình.
🔬 5. Thí nghiệm: “Bản giao hương điện áp”
Hãy cùng nhau tự tay thiết kế và lập trình kiểm chứng một mạch phân áp thực hành để theo dõi nhịp điệu thay đổi của điện áp theo cường độ sáng.
🧪 Thực hành đo lường phân áp quang trở
Chuẩn bị linh kiện:
- 01 Quang trở LDR.
- 01 Điện trở cố định 10 kΩ .
- 01 Bo mạch Arduino Uno (hoặc tương đương) kèm cáp nối.
- Các dây dẫn cắm breadboard.
Các bước tiến hành:
- Nối nguồn cấp điện dương 5V} của Arduino vào một chân bất kỳ của quang trở LDR.
- Chân còn lại của LDR kết nối vào chân nhận tín hiệu tương tự A0 của Arduino, đồng thời rẽ nối tiếp qua điện trở cố định 10 kΩ xuống chân cực âm GND (tạo mạch phân áp với cảm biến nằm trên).
- Mở phần mềm Arduino IDE, viết mã đọc giá trị analog chân A0 cơ bản và mở bảng Serial Monitor để theo dõi.
- Dùng đèn pin điện thoại chiếu trực diện vào LDR, sau đó lấy tay che tối hoàn toàn cảm biến và ghi nhận sự thay đổi số số liệu.
Kết quả thí nghiệm:
Bạn sẽ thấy thông số hiển thị tăng vọt lên cao gần ngưỡng cực đại 1023 khi chiếu luồng sáng mạnh vào LDR (do điện trở R_1 giảm mạnh làm tăng điện áp V_o), và sụt sâu xuống gần mốc 0 khi bị che khuất. Chúc mừng bạn đã tự tay chế tạo thành công một bộ đo ánh sáng tuyến tính siêu rẻ!
🌐 6. Ứng dụng đa lĩnh vực của mạch giao tiếp
Các giải pháp điều phối điện áp này bảo vệ độ tin cậy và chính xác của mọi hệ thống IoT hiện đại:
- Nhà thông minh: Đảm bảo hệ thống phím bấm cảm ứng điện dung không bị kích hoạt nhầm bởi các sóng vô tuyến lân cận nhờ điện trở kéo ổn định logic.
- Hệ thống công nghiệp: Bảo vệ vững chắc các đường truyền bus dữ liệu tốc độ cao (như CAN bus, RS-485) khỏi xung nhiễu điện từ cực mạnh của các hệ thống động cơ motor nhà xưởng.
- Công nghệ Robot: Thiết lập ngắt khẩn cấp ngay tức khắc cho robot tự hành thông qua cảm biến va chạm vật lý (Bumper) sử dụng mạch pull-up.
- Công nghiệp Ô tô: Hỗ trợ hộp đen điều khiển trung tâm ECU đo đạc mượt mà hành trình dịch chuyển bàn đạp ga dựa trên sự biến thiên điện áp phân áp từ các biến trở góc quay.
⚠️ 7. Các sai lầm phổ biến cần đặc biệt tránh
🛑 Tránh các “bẫy” phần cứng sau
- Sử dụng điện trở kéo có giá trị quá nhỏ (Ví dụ 100 Ω): Sẽ tạo ra dòng điện hao phí chạy thẳng xuống đất cực kỳ lớn mỗi khi bạn bấm nút nhấn, gây sụt pin nhanh chóng và làm nóng nóng hư hại các thành phần linh kiện.
- Sử dụng điện trở kéo quá lớn (Ví dụ 1 MΩ): Làm giảm cường độ dòng điện chạy qua quá mức, khiến chân chip phản hồi cực kỳ lờ đờ trước các xung thay đổi nhanh, đồng thời chân chip dễ bị lọt tạp nhiễu trở lại.
- Quên đấu nối chung đất (Common Ground): Khi bạn thiết kế mạch cấp điện cho cảm biến từ một bộ nguồn độc lập nhưng lại quên nối chung chân cực âm (GND) của nguồn đó với chân GND của vi điều khiển. Hệ quả là tín hiệu đưa về không có điểm mốc so sánh điện thế chung, làm giá trị ADC nhảy loạn xạ hoàn toàn vô nghĩa.
🚀 8. Kiến thức nâng cao: Bản chất hằng số thời gian RC
Trong thiết kế các mạch phần cứng truyền thông tốc độ cao, điện trở kéo không chỉ đơn giản là xác lập mức logic tĩnh.
🎓 Hằng số thời gian RC trong truyền thông tốc độ cao
Khi kết hợp điện trở kéo với các giá trị điện dung ký sinh vốn luôn tồn tại tự nhiên trên đường dây dẫn đồng, chúng ta đã vô tình tạo ra một bộ lọc thông thấp tương tự (RC Low-pass Filter).
Đối với các giao thức truyền thông dữ liệu tốc độ cao như I2C hoặc cổng USB, nếu bạn lựa chọn sai điện trở kéo quá lớn, thời gian nạp và xả của tụ ký sinh sẽ kéo dài ra, bẻ cong sườn dốc sóng vuông sắc nét của tín hiệu số thành hình vây cá mập bo tròn đầu. Hệ quả trực tiếp là bộ nhận tín hiệu không thể nhận diện đúng dữ liệu nhị phân truyền về. Đó chính là lý do vì sao trên các tuyến bus truyền thông tốc độ cao, kỹ sư luôn sử dụng điện trở kéo có trị số nhỏ hơn rất nhiều (chỉ dao động từ 2.2 kΩ đến 4.7 kΩ) nhằm rút ngắn thời gian trễ này.
👉 Bài tiếp theo nên đọc:
“Áp suất & Khí quyển: Từ phong vũ biểu đến MEMS – Làm sao để cân cả bầu trời trong một con chip?” để khám phá cách thức những màng silicon siêu mỏng co giãn nhạy bén để đo áp suất bầu khí quyển xung quanh ta!
📝 Câu hỏi trắc nghiệm kiểm tra kiến thức
Question 1: Hiện tượng “Lơ lửng” (Floating State) ở chân ngõ vào vi điều khiển xảy ra khi nào?
- (A) Khi chân ngõ vào được nối trực tiếp với một điện trở kéo vàng có trị số 10 kΩ.
- (B) Khi chân ngõ vào hoàn toàn không được kết nối với bất kỳ mức điện áp xác định rõ ràng nào.
- (C) Khi nguồn cấp điện chính cho các mạch cảm biến xung quanh rơi vào trạng thái quá tải công suất.
Click to reveal answer and explanation
The correct answer is (B).
Explanation: Trạng thái lơ lửng (floating) xuất hiện khi một chân ngõ vào của chip bị để trống hoàn toàn, không có hệ quy chiếu điện áp lên cực dương hay cực âm. Lúc này chân chip hoạt động như một ăng-ten tự do hấp thụ tạp nhiễu sóng điện từ môi trường. Đáp án A là giải pháp khắc phục hiện tượng này, đáp án C mô tả lỗi sụt dòng nguồn cấp.
Question 2: Để thiết lập trạng thái logic mặc định của một nút nhấn kết nối vào vi điều khiển luôn ở Mức Cao (1), ta cần thiết kế cấu hình phần cứng nào?
- (A) Thiết lập cấu hình sử dụng Điện trở Kéo lên (Pull-up).
- (B) Thiết lập cấu hình sử dụng Điện trở Kéo xuống (Pull-down).
- (C) Thiết lập mạch phân áp (Voltage Divider) ở trạng thái cân bằng đối xứng hai điện trở.
Click to reveal answer and explanation
The correct answer is (A).
Explanation: Cấu hình điện trở Pull-up thực hiện việc kéo điện áp của chân chip ngõ vào lên trực tiếp nguồn dương $V_{CC}$, qua đó duy trì trạng thái logic mặc định là 1 khi nút nhấn đang hở. Đáp án B ngược lại luôn duy trì mặc định ở mức logic 0; đáp án C chuyên dùng đo đạc biến thiên analog của cảm biến điện trở.
Question 3: Trong mạch phân áp, nếu cảm biến (giả định đóng vai trò là điện trở R_1 ở nhánh trên) có điện trở giảm xuống do biến động môi trường, mức điện áp ngõ ra thu được V_o (đo trên điện trở cố định R_2) sẽ biến đổi như thế nào?
- (A) Mức điện áp ngõ ra V_o thu được sẽ tăng lên.
- (B) Mức điện áp ngõ ra V_o thu được sẽ sụt giảm xuống.
- (C) Mức điện áp ngõ ra V_o thu được hoàn toàn giữ nguyên không đổi.
Click to reveal answer and explanation
The correct answer is (A).
Explanation: Dựa trên hệ thức toán học định luật Ohm cho cầu phân áp Vₒ = Vₛ × [R₂ / (R₁ + R₂)], khi đại lượng điện trở cảm biến R_1 ở tử số và mẫu số giảm đi, mẫu số chung (R_1 + R_2) sẽ nhỏ đi, kéo theo thương số của phân số tăng lên. Do đó điện áp đo được ngõ ra V_o sẽ tăng lên tuyến tính. Đáp án B và C không đúng quy luật tính toán điện tử.
Question 4: Trị số điện trở kéo thông dụng, phổ biến nhất được các kỹ sư lựa chọn cho các phím nhấn vi điều khiển thông thường là bao nhiêu?
- (A) 10 Ω.
- (B) 100 Ω.
- (C) 10 kΩ.
Click to reveal answer and explanation
The correct answer is (C).
Explanation: Giá trị điện trở kéo 10 kΩ là giá trị “tỷ lệ vàng” giúp ngăn chặn tuyệt đối tạp nhiễu lơ lửng xâm nhập mà vẫn tiết kiệm hao tổn năng lượng mạch. Các giá trị điện trở 10 Ω và 100 Ω quá nhỏ, gây xuất hiện dòng rò rỉ cực lớn chạy thẳng xuống đất khi bấm nút, làm nóng và tiêu tốn năng lượng mạch vô ích.
Question 5: Lỗi thiết kế phần cứng “Quên nối chung cực âm/đất” (Common Ground) khi bạn sử dụng một nguồn điện độc lập bên ngoài để cấp năng lượng cho cảm biến sẽ trực tiếp dẫn đến hiện tượng gì?
- (A) Vi điều khiển chính của hệ thống sẽ lập tức bị chập cháy ngay khi cắm nguồn cấp điện.
- (B) Tín hiệu điện áp truyền về vi điều khiển nhảy loạn xạ bất định vì không có mốc so sánh điện thế 0 V chung.
- (C) Bộ cảm biến đo đạc và hoạt động với độ chuẩn xác tuyệt đối nhờ sự cách ly hoàn toàn dòng nguồn điện.
Click to reveal answer and explanation
The correct answer is (B).
Explanation: Điện áp về bản chất vật lý là hiệu điện thế so sánh giữa hai điểm điện thế bất kỳ. Nếu vi điều khiển chính và bộ cảm biến ngoại vi không được kết nối chung một chân đất đất chung 0 V (Common Ground), chip sẽ hoàn toàn mất đi mốc đo điện thế quy chiếu chuẩn, khiến việc xử lý dữ liệu đo đạc ADC bị sai lệch nhảy múa liên tục. Phương án A và C đều sai nguyên lý mạch điện thế tương đối.